Prosthesis Manipulation
A General Model for Estimating Lower Extremity Inertial Properties of Individuals
with Transtibial Amputation
Abbie E. Ferris, Jeremy D. Smith, Gary D. Heise, Richard N. Hinrichs, Philip E. Martin
Lower extremity joint moment magnitudes during swing are dependent on the inertial properties of the prosthesis and residual limb of individuals with transtibial amputation (TTA). Often, intact limb inertial properties (INTACT) are used for prosthetic limb values in an inverse dynamics model even though these values overestimate the amputated limb’s inertial properties. The purpose of this study was to use subject-specific (SPECIFIC) measures of prosthesis inertial properties to generate a general model (GENERAL) for estimating TTA prosthesis inertial properties. Subject-specific mass, center of mass, and moment of inertia were determined for the shank and foot segments of the prosthesis (n = 11) using an oscillation technique and reaction board. The GENERAL model was derived from the means of the SPECIFIC model. Mass and segment lengths are required GENERAL model inputs. Comparisons of segment inertial properties and joint moments during walking were made using three inertial models (unique sample; n = 9): (1) SPECIFIC, (2) GENERAL, and (3) INTACT. Prosthetic shank inertial properties were significantly smaller with the SPECIFIC and GENERAL model than the INTACT model, but the SPECIFIC and GENERAL model did not statistically differ. Peak knee and hip joint moments during swing were significantly smaller for the SPECIFIC and GENERAL model compared with the INTACT model and were not significantly different between SPECIFIC and GENERAL models. When subject-specific measures are unavailable, using the GENERAL model produces a better estimate of prosthetic side inertial properties resulting in more accurate joint moment measurements for individuals with TTA than the INTACT model.
Smith, J.D., Ferris,A.E., Heise, G.D. , Hinricks,R.N., Martin, P.E. Presented at ASB 2013
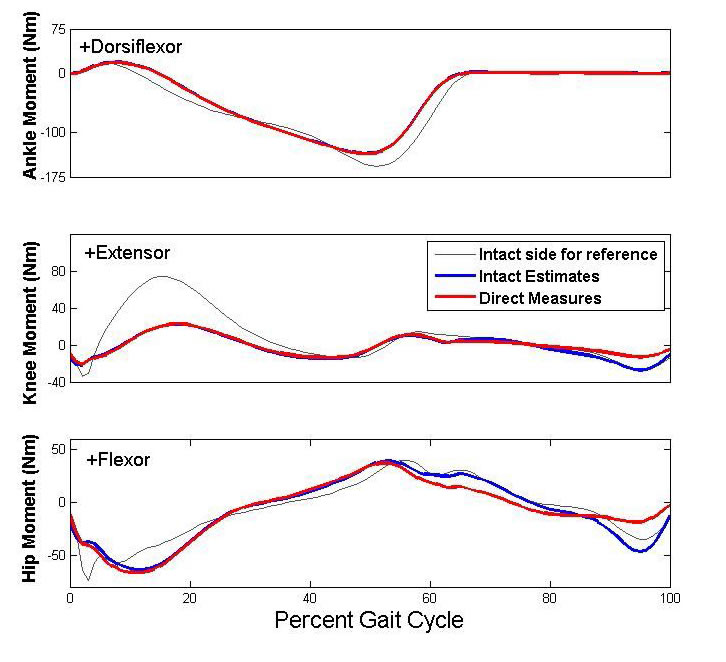
Using intact segment inertial properties to model the prosthetic side during swing
would suggest a higher muscular demand to control the limb that was actually more
comparable to the
control utilized in the intact limb. Thus, one might be lead to interpret that prosthetic
side joint function
during swing as similar to that of an intact leg. As such, when focusing on swing
phase
mechanics, researchers should use direct measures of prosthesis inertia in inverse
dynamics models,
but during stance the inertia parameters seem to have little impact on study outcomes.